课题项目
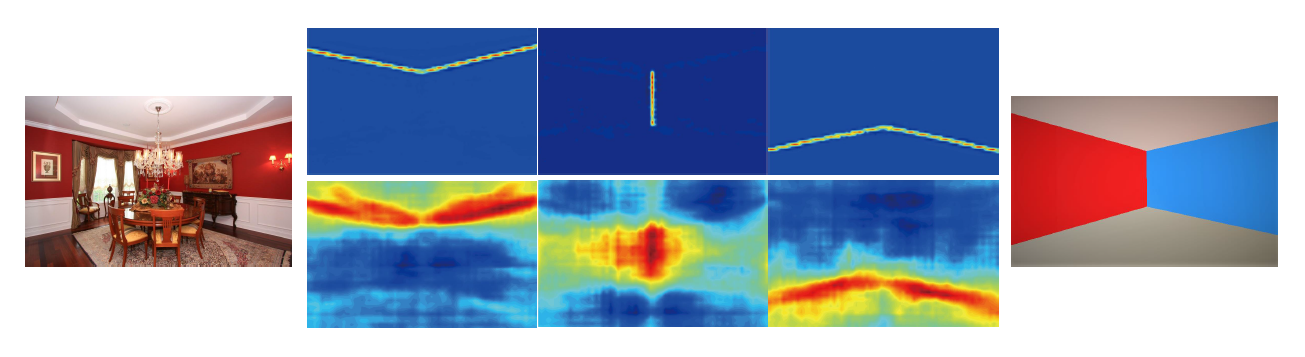
使用RBG图像作为输入,利用全卷积神经网络的方法实现室内场景二维拓扑识别,相较之前方法效果有较大提升。将全卷积神经网络输出的feature map作为输入进行三维拓扑重建,经过非线性规划方法求解得到三维平面的单位法向量和三维平面到相机中心距离,进而渲染得到最右侧的三维拓扑。...
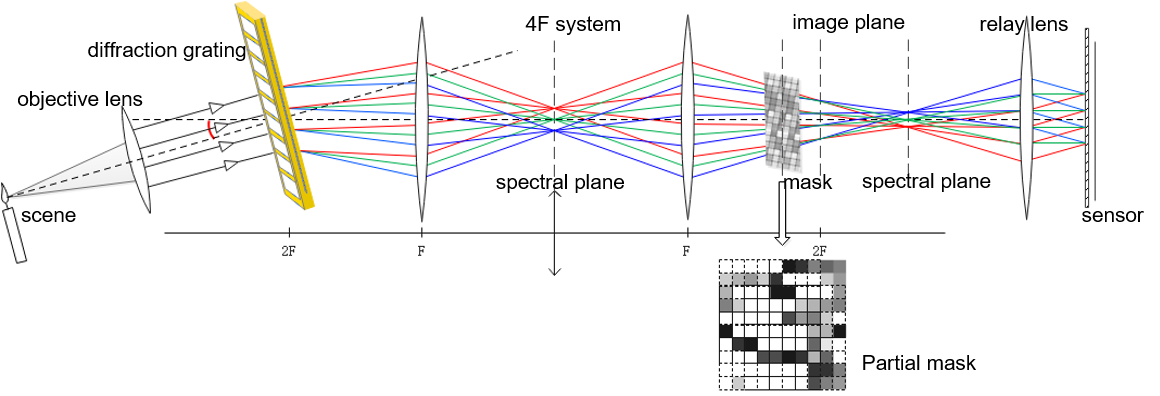
主要研究当前计算机视觉领域新兴方向——压缩高光谱掩膜优化,让相机可以在不牺牲时间分辨率的情况下得到视场的光谱信息,并在孔径编码的基础上对掩膜做进一步迭代优化,使得最后解压重建高光谱数据块成像质量高于常用的基于随机掩膜的重建效果,进一步提高了图像的信噪比,增加了图像光谱准确率,为处理动态图像提供了有效可行的研究手段。...
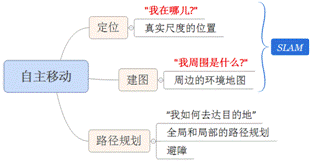
SLAM(Simultaneous Localization and Mapping),同步定位与地图构建,最早在机器人领域提出,它指的是:机器人从未知环境的未知地点出发,在运动过程中通过重复观测到的环境特征定位自身位置和姿态,再根据自身位置构建周围环境的增量式地图,从而达到同时定位和地图构建的目的。由于SLAM......